Fer un robot aspirador a casa amb les vostres pròpies mans
Per crear aspirador robot Amb les vostres pròpies mans, n'hi ha prou amb adquirir el mínim necessari de coneixements teòrics i un conjunt de components de fàcil accés. Aquest ajudant mantindrà netes les plantes i estalviarà temps a la neteja. A causa de la presència de sensors especials, el mecanisme no només es mou al voltant de la sala, sinó que també el guia. El procés de fabricació a casa tindrà temps i paciència, però el programa de creació és molt senzill i accessible fins i tot als aficionats, i els diners gastats en això són molt inferiors al preu dels aparells de mercat.
El contingut
Aspectes teòrics del problema
Els artesans domèstics han deduït de manera pràctica els requisits de les aspiradores robotitzades, que cal seguir quan es creen. El resultat del compliment serà un mecanisme adequat per a operacions posteriors. La llista de regles bàsiques és la següent:
- es recomana fer un robot en forma de cilindre petit;
- perquè la màquina pugui girar-se al lloc - les rodes s'han de col·locar al llarg del diàmetre;
- no es necessita cap volant addicional;
- el mecanisme ha de recollir les escombraries en una safata d'escombraries fàcilment extraïble;
- el robot ha d'estar equipat contacte amb el para-xocsocupant almenys la meitat de la seva circumferència;
- La càrrega del dispositiu s'ha de fer des del carregador sense desmuntar-lo;
- la millor ubicació per al centre de gravetat del robot són les rodes, també se li permet tenir-la a prop;
- velocitat de moviment òptima: de 25 a 35 cm / s;
- Els motors funcionen conjuntament amb caixes de canvi equipades amb molls.
Hi ha models amb motors pas a pas, que us permeten gestionar programàticament sense utilitzar caixes de canvis.
Maneres de garantir el moviment, la neteja i la potència de l’aspirador robot
El moviment d'un dispositiu robotitzat en el cas general es duu a terme de dues maneres: en espiral (des del centre cap a l'exterior) i en ziga-zaga. En els microcontroladors també es poden gravar i els esquemes de les habitacions per separat.
L’orientació espacial, els obstacles de desviació al llarg del camí que proporciona l’aspirador gràcies als sensors integrats de contacte i infrarojos, formen un sistema de retroalimentació. La infraroja regula el moviment, determinant la distància a les parets, objectes, diferències d’altura. Els sensors de contacte funcionen amb para-xocs quan toquen un obstacle (per obtenir més detalls sobre com funciona el dispositiu, consulteu l'articleprincipis de funcionament de robot aspiradors).
Una aspiradora automàtica amb una font d’alimentació autònoma, per descomptat, no desenvolupa tal aspecte potència de succiócom a opció manual. Les proves pràctiques han mostrat la gran eficiència d’utilitzar un petit raspall juntament amb una turbina d’aspiració. Per netejar a les cantonades La part davantera de l’aspiradora està equipada amb 2 raspalls que, quan s’utilitzen, recullen els residus de la principal.
La font d’alimentació del sistema robotitzat es pot dur a terme a partir de diverses bateries, la tensió dels quals és de 12 V (18 V) i la seva capacitat és de 7 Ah. La càrrega es realitza per contacte directe o sense fils. L’ús d’aquest últim augmenta el cost dels components.
El retorn independent del robot al lloc de càrrega és una tasca difícil que es pot resoldre instal·lant un far de transmissió.
Hi ha qualsevol model automatitzat controlador basat (sistema cerebral). Per tant, és necessari estudiar el seu llenguatge de programació per introduir l'algoritme d'ordres. També hauria de tenir en compte l’orientació intuïtiva de la interfície d’ordres, que simplifica enormement el procés.Tant el microcontrolador com els sensors utilitzats solen tenir connectors estandarditzats per a les connexions, per la qual cosa poques vegades es requereix la soldadura.

Preparació per a la implementació pràctica del projecte
Penseu en l’aplicació dels principis anteriors basats en la plataforma Arduino Mega 2560. El procés de creació consistirà en diverses etapes:
- preparació d'eines i materials;
- la fabricació d'habitatges amb rodes i un departament de recollida d'escombraries, pols i turbines;
- instal·lació de sensors i microcontroladors, motors amb caixes de canvis, bateria, raspalls;
- fer connexions elèctriques;
- la introducció del programa a Arduino, que determina la consistència dels sensors;
- prova funcional del robot aspirador i la seva capacitat de càrrega independent.
La idea s’implementa utilitzant els següents materials i eines:
- Controlador Arduino - 1 pc, amb controladors;
- full de fusta contraplacada (o cartró gruixut) - 1 metre quadrat;
- rodes - 3 peces;
- un cable amb una secció transversal de no més de 0,75 mm.kv (es farà un parell trenat): uns 2 m;
- font d'alimentació - 4 bateries de 18 V cadascuna, indicador de càrrega per a ells, carregador;
- sensors infrarojos - 4 peces, contacte - 2 peces;
- motors elèctrics: per a una turbina - 1 pc, girant un raspall - 1 pc, 2 motors amb reductor que proporcionen moviment;
- cas de clorur de polivinil - 1 pc;
- cola - 1 paquet, cargols autorroscants - 10 peces, cinta adhesiva - 1 pc, joc d'imants;
- un conjunt de tornavisos i trepants, alicates, ganivets de papereria, llapis, regle, tornavís, trencaclosques.
Muntatge d’un robot aspirador
Preparant tot el que necessiteu, podeu procedir a l'assemblea. Consisteix a passar pels passos descrits anteriorment.
- Creem un cos cilíndric de cartró o clorur de polivinil: diàmetre - 30 cm, alçada - 9 cm, gruix de la paret - 0.6 cm. El fons és millor tallar la fusta.
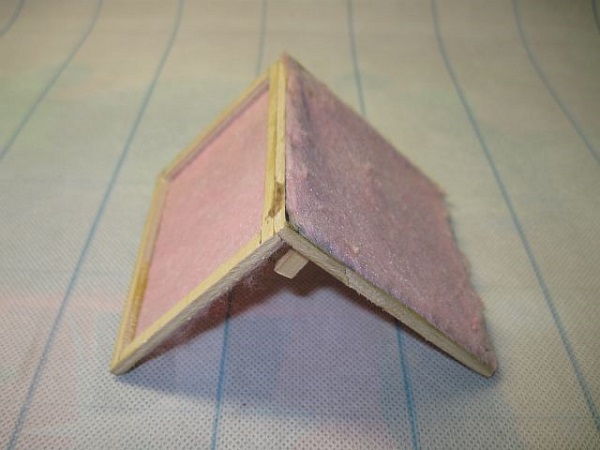
- Arreglem el cas Para-xocs de PVC utilitzant cinta adhesiva, preinstal·lant sensors infrarojos i reaccionant a l'impacte.
Sensor de col·lisió

Para-xocs adjunta
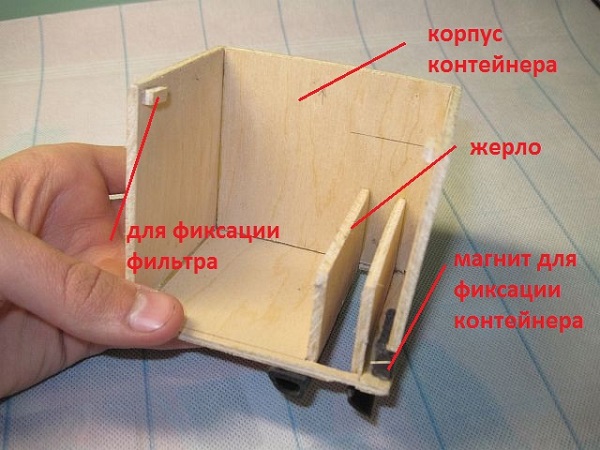
- Fem un compartiment per a escombraries procedent d’un cartró o clorur de polivinil amb tapa fixada per imants.
- Fem un filtre de tovallons de tela.
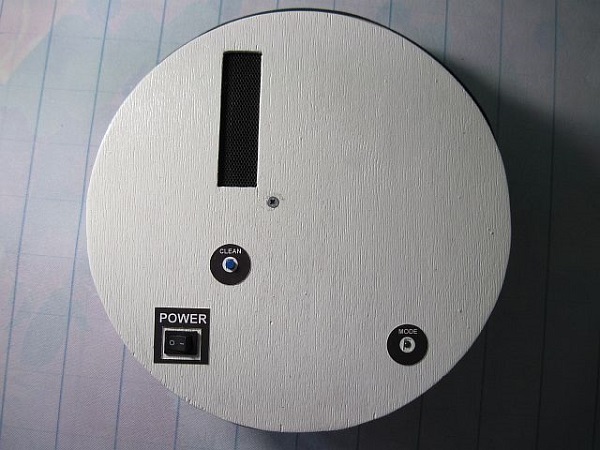
- Fem una turbina de policlorur de vinil i discs d’ordinador, instal·lem.
- Connectem els sensors al controlador: el mode de funcionament normal correspon a un de lògic i la resposta a zero.
- El motor del raspall frontal està connectat a l'arduino mega 2560 a través d'un transistor MOSFET, que garanteix la seva ràpida rotació a les cantonades i més aviat lent a la zona principal de l'habitació.
- Instal·la 4 bateries (connecteu-les per parelles, cada parella en sèrie) i el carregador, connecteu-les.
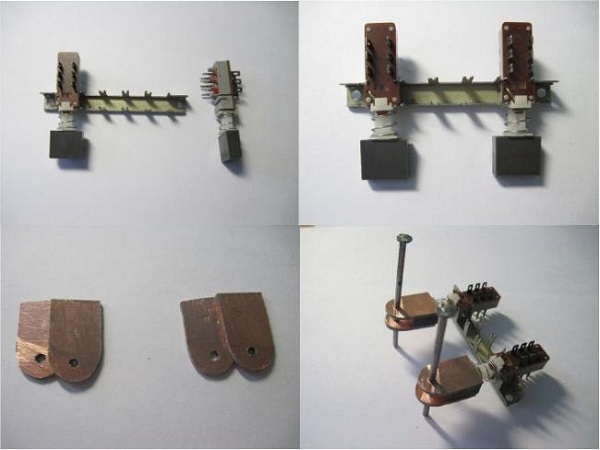
- Muntem raspalls fetes independentment de la línia de pesca i de les rodes (adquirides o extretes d'una joguina adequada) a la part inferior.

Raspall radial
- Instal·lem els programes necessaris a l'arduino utilitzant un ordinador que es pot trobar a Internet.
- Comprovem la fixació de tots els components a la part inferior i les parets de la carcassa.
- Talla una coberta de cartró o PVC, fixeu-lo amb cargols.
El punt important del treball és el retorn del para-xocs a la seva posició original després de colpejar un obstacle, és a dir, la seva elasticitat suficient.
Totes les peces estan subjectes als connectors disponibles per a aquest fi amb cargols o cinta o cinta. El resultat es mostra a la foto:
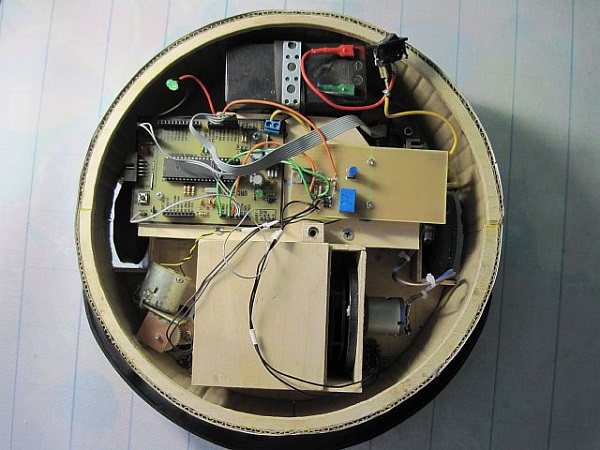
/rating_off.png)